人機介面的大英雄夢
這次有幸到東京參加世界最頂尖的人機介面學術研討會 UIST (User Interface Software and Technology) 2016,一瞥未來人們和機器如何共存。
今天我們置身於螢幕環繞的世界,螢幕已經成為電腦的刻板印象。然而,螢幕作為一種顯示器,只能傳遞視覺(和聽覺)資訊嗎?顯示器「最終極」的形式會是什麼呢?
早在 1968 年就做出第一個虛擬實境(VR)系統的 Ivan Sutherland 寫道 The Ultimate Display:
終極的顯示器,當然,會是一個能用電腦控制物質存在的房間。在這樣的房間裡顯示的一張椅子,可以給人們坐下。在這樣的房間裡顯示的手銬,可以給予真實的限制,而在這樣的房間裡顯示的一顆子彈,足以致命。在適當的程式控制下,這樣的顯示器可以說就是愛麗絲走進的仙境。1
這是什麼意思呢?其實就像是電影《大英雄天團》中的微型機器人,可以變成任意形狀、擁有任意的物質特性:

Microbots from Big Hero 6. (Credit: Disney)
Claytronics 2 和 Radical Atoms 3 都試著告訴我們,未來的物質是可以寫程式控制的(programmable matter)。在今年的展示中,我看到研究者從不同角度朝這個理想邁進,各自開展不同的互動可能性:
ChainFORM: 自由組裝的變形鎖鏈 4
MIT Media Lab 做了一條可以組裝、拆解的鎖鏈,可以感知人們對它的變形或觸摸,做出對應的彎曲或顯示不同顏色,它可以變成筆、搖桿、角色,或穿在身上:
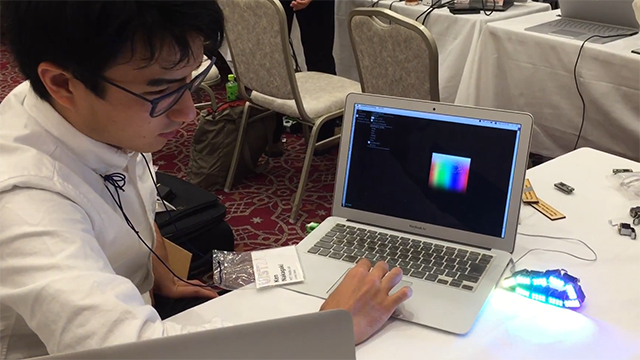
ChainFORM demo at UIST
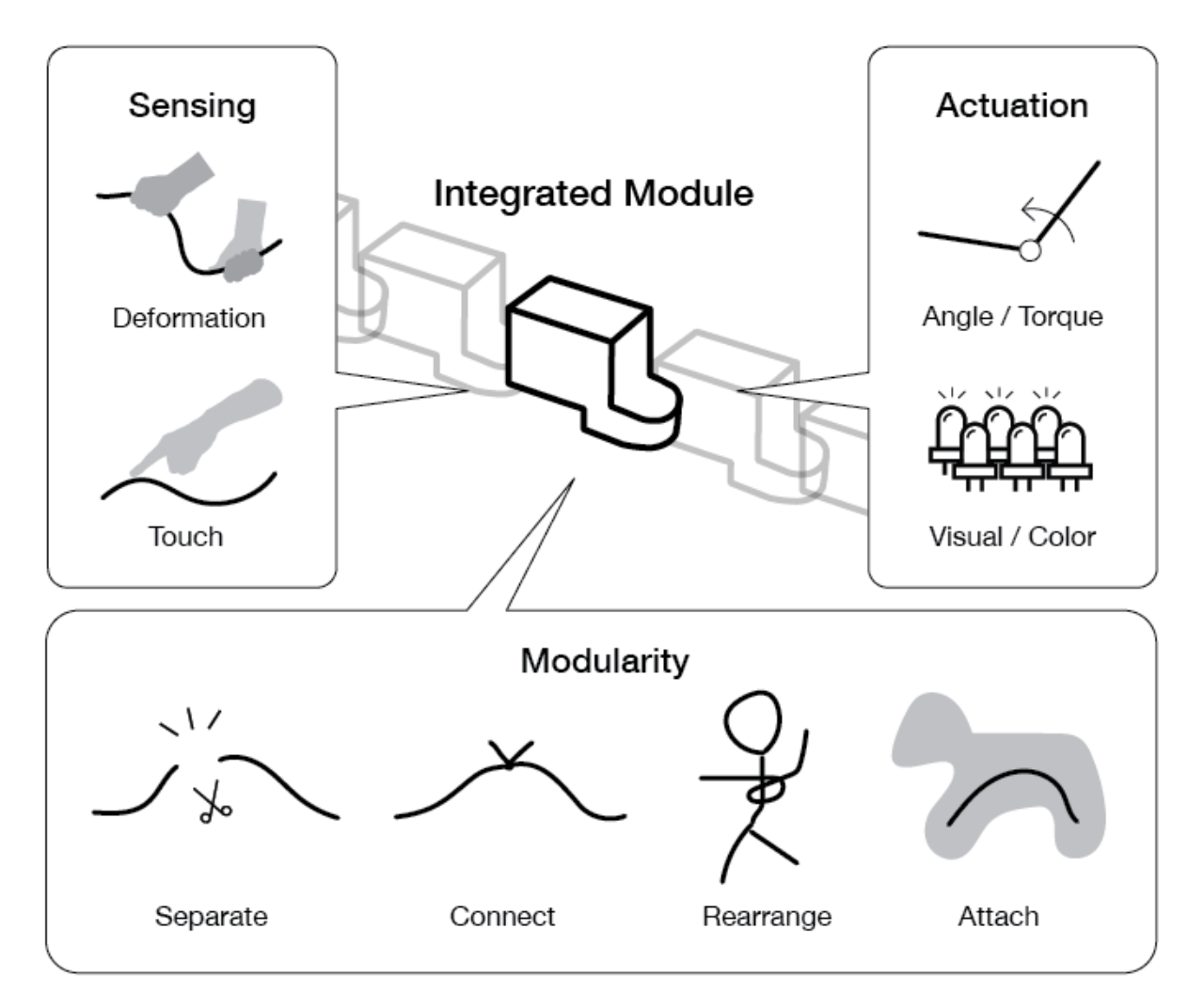
ChainFORM Design Space (Source: ACM)
Zooids: 多細胞機械生物群 5
Stanford 做出一群很小的機器車,可以在平面上自由移動,就像是多細胞生物一樣,它們可以聚集成一個形狀,或是分開成不同的群體。讓數位資訊和日常生活的環境完全融為一體,不再是螢幕一大片,而是散佈在空間中、且可以直接對它們操作的顯示器,是無所不在的機器人(Ubiquitous Robotic Interfaces):
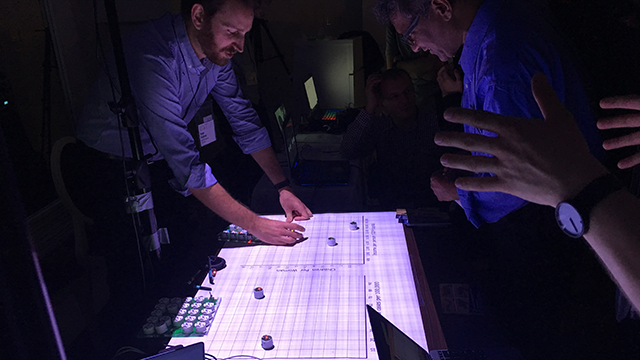
Zooids demo at UIST
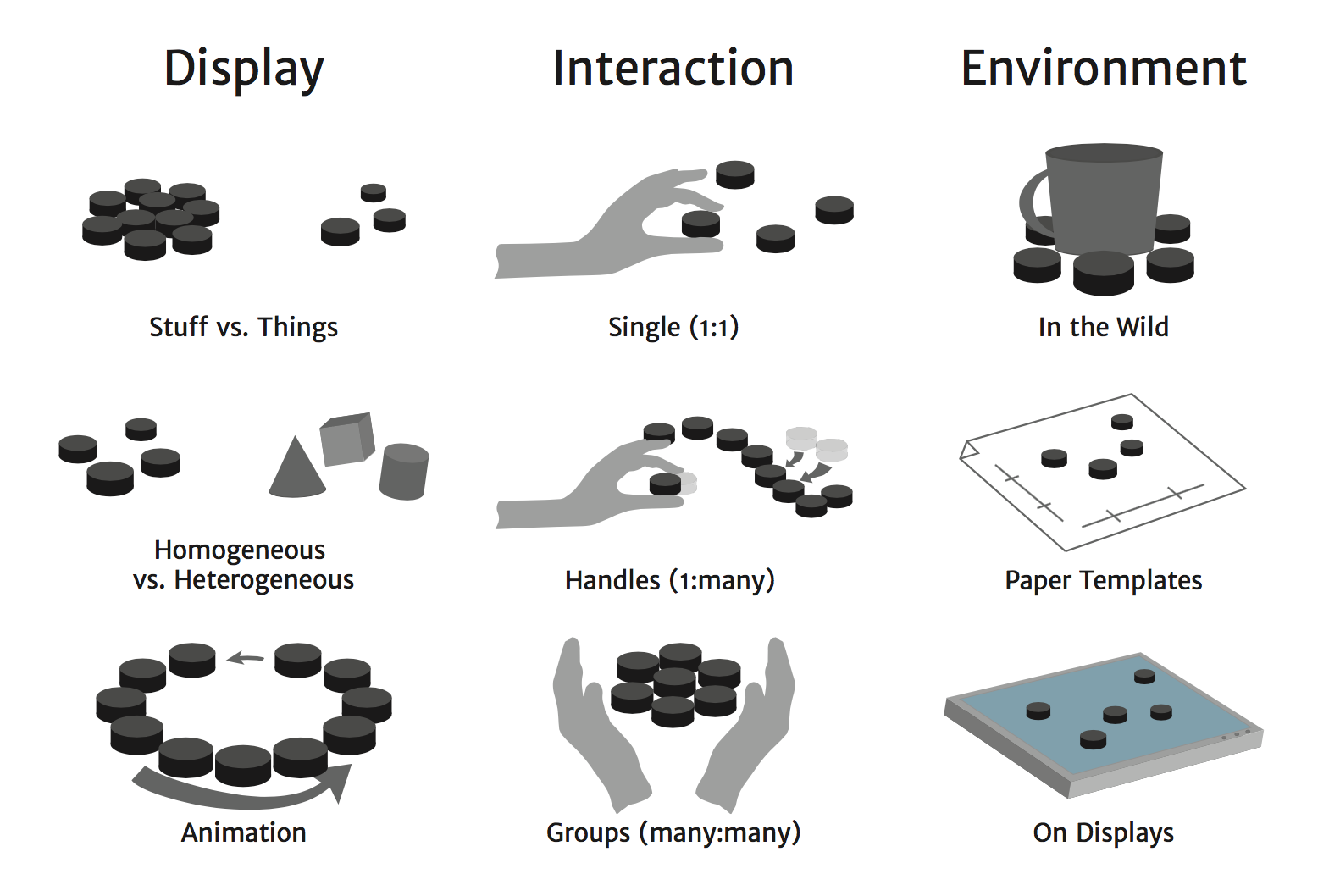
Zooids Design Space (Source: ACM)
Rovables: 爬滿身的小夥伴們 6
如果這群小機器人在身上,會怎麼樣呢?MIT Media Lab 和 Stanford 嘗試用磁鐵把機器車放在衣服上,讓穿戴式裝置不再固定在手腕或脖子上,可以依照不同的需求移動到不同的地方,例如為了偵測人體運動或心跳移動到適合的位置、自動依照場合拉動圍巾、利用拍打提示訊息:

Rovables demo at UIST
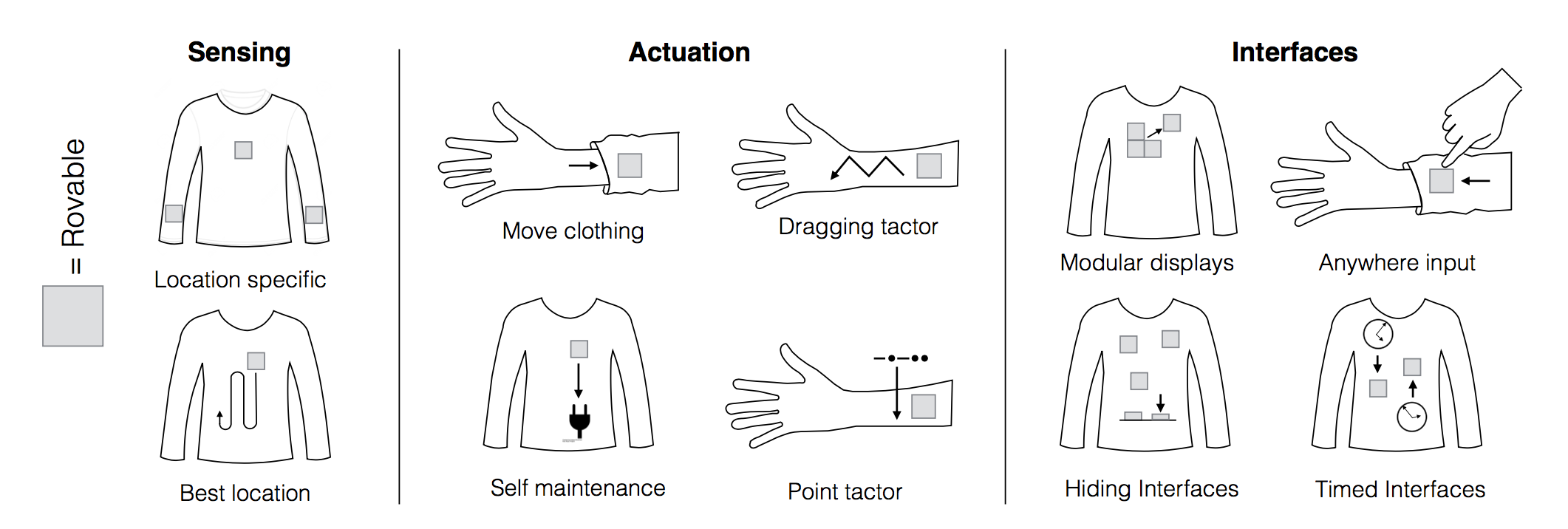
Rovables Design Space (Source: ACM)
實際玩過這些展示後,會知道它們還很脆弱,只是 Proof of Concept 。也還有很多待解決的問題,如何做更精準的定位?如何形成三維的形狀?如何讓機器人在不需要時消失?
儘管如此,這群小機器人很真誠地邀請你,一起進入這個未來,如果你願意的話。
-
“The ultimate display would, of course, be a room within which the computer can control the existence of matter. A chair displayed in such a room would be good enough to sit in. Handcuffs displayed in such a room would be confining, and a bullet displayed in such a room would be fatal. With appropriate programming such a display could literally be the Wonderland into which Alice walked.” - The Ultimate Display (1965). Ivan Edward Sutherland 被稱之為「計算機圖形」之父,發明 Sketchpad,開創 Direct Manipulation 的圖形介面互動,並因此獲得圖靈獎。 ↩
-
Goldstein, S. C., Campbell, J. D., & Mowry, T. C. (2005). Programmable Matter. Computer, 38(6), 99-101. ↩
-
Hiroshi Ishii, Dávid Lakatos, Leonardo Bonanni, and Jean-Baptiste Labrune. (2012) Radical Atoms: Beyond Tangible Bits, Toward Transformable Materials. Interactions 2012. ↩
-
ChainFORM: A Linear Integrated Modular Hardware System for Shape Changing Interfaces (UIST ‘16) 這篇研究是建立於前一年同樣也發表在 UIST 的 LineFORM: Actuated Curve Interfaces for Display, Interaction, and Constraint,探索「線狀」的介面的互動方式,這類的機器人在機器人的領域中被稱之為 Snake robots。 ↩
-
Zooids: Building Block for Swarm User Interface (UIST ‘16) 這類的機器人在機器人的領域中被稱之為 Swarm robots,可以參考哈佛大學實驗室關於 Programmable Robot Swarms 的研究。 ↩
-
Rovables: Miniature On-Body Robots as Mobile Wearables (UIST ‘16) 後續研究可以參考發表於 DIS 2017 的 Kino ↩